Motors
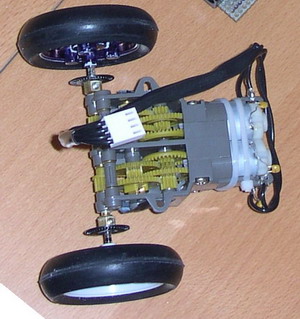
The transmission part of the robot is very simple. It is a small motor-grearbox, usually mounted on toys. The power of each motor is low (1W), but this is enough.
The mechanics of the motor-gearbox is very poor (lot of backlash and friction). It is therefore a bit more complex to control than with high quality motors, but it is not impossible.
I soldered 2 small capacitors between each plot of a motor, and the case of the motor. This reduces a lot the interferences emitted by the motors.
Tamiya Motor-gearbox